
CASACor - Pininfarina
2018

Cisco - C9100AP
2020
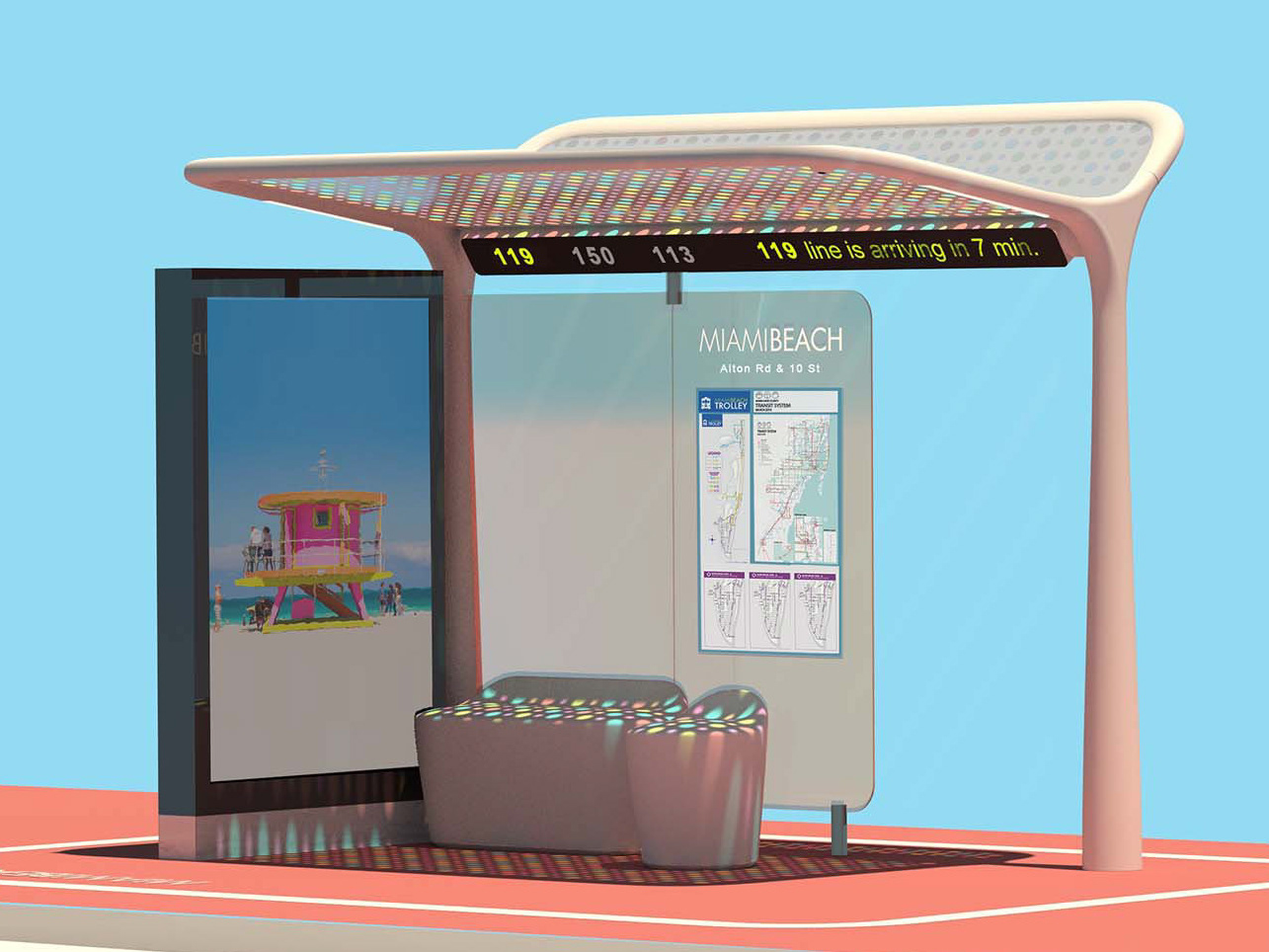
Miami Beach Bus Shelter
2019
Cisco - Developing the design language
2020

Shaefer yachts
2017

Cisco - servers and switches
2020
SunVessel charging station
2020

Crane MS vending machine
2013

Apple Park light fixtures
2017

Stinger MK100
2006
Electrolux - food preservation
2013

Stinger CT100
2006
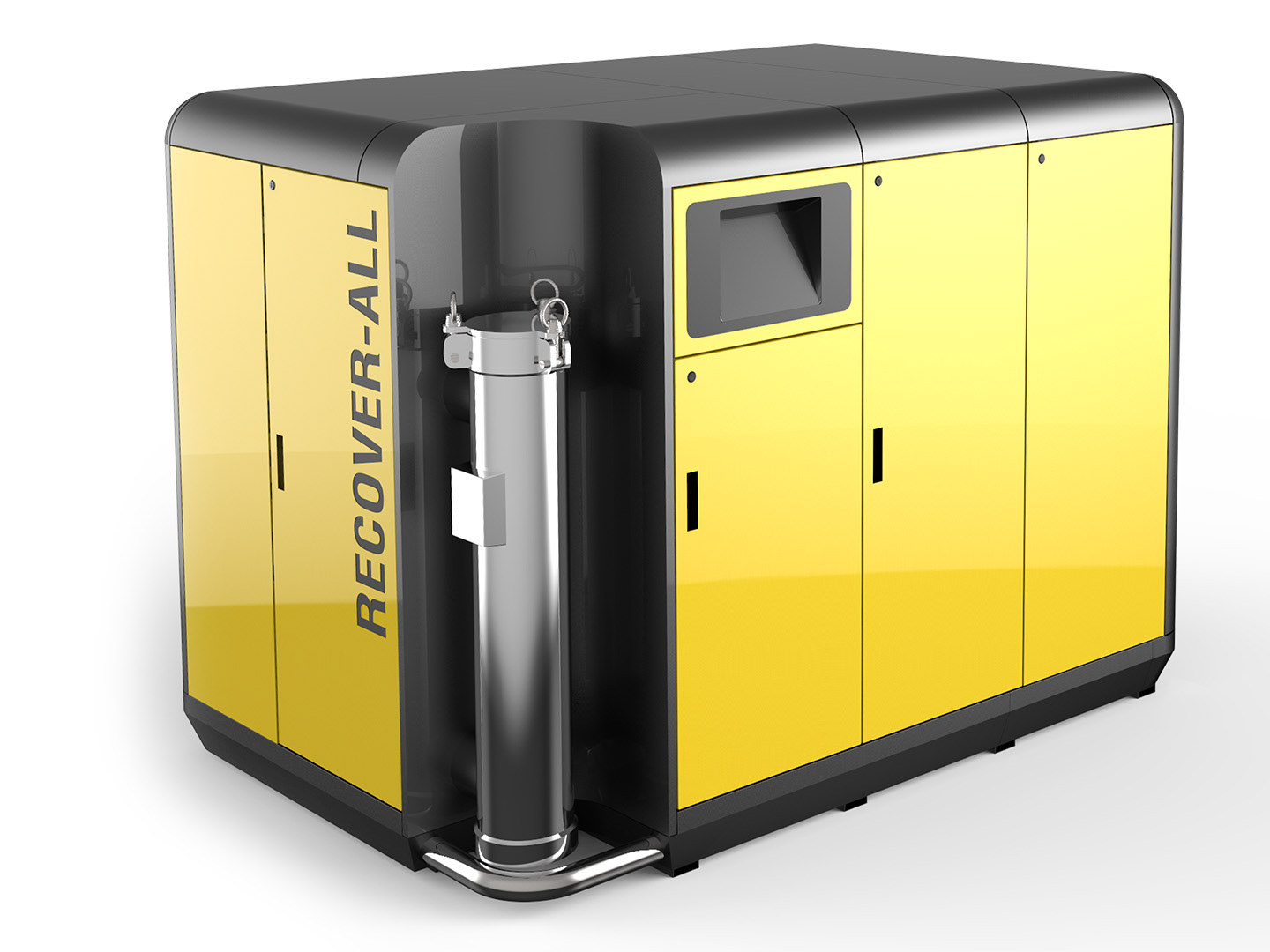
Recover-All
2012

Origo 3D printer
2011

Shadow trainer
2009